











 U ovom projektu, videćete kako da napravite sami svoj “robot” (bolje reći autonomno vozilo) koji može samostalno da prati liniju tokom kretanja. Naše robotizovano vozilo će pokretati dva servo motora, biće nam potrebna dva točka, nešto “elektronike” i ploča na koju ćemo sve to postaviti. No krenimo redom.
U ovom projektu, videćete kako da napravite sami svoj “robot” (bolje reći autonomno vozilo) koji može samostalno da prati liniju tokom kretanja. Naše robotizovano vozilo će pokretati dva servo motora, biće nam potrebna dva točka, nešto “elektronike” i ploča na koju ćemo sve to postaviti. No krenimo redom.
Koristićemo servo motore jer su nam oni bili dostupni. Naravno možete koristiti i druge tipove motora, ako zadovoljavaju potrebe brzine i snage. Servomotore moramo najpre rasklopiti (slika 1), kako bismo iz njih izvadili upravljačku elektroniku. Potrebno je da ostavimo samo žice za napajanje motora. Vratite sve zupčanike, izuzev onog koji prenosi kretanje na potenciometar. Ovo treba uraditi kako bi se omogućio pun opseg kretanja. Zatim treba sastaviti motor.

Slika 1. Rasklopljen servo motor
Robot se sastoji iz dva dela (slika 2). Prvi deo predstavlja “telo” robota, na koje se postavljaju motori, točkovi, upravljačka elektronika itd. i prednjeg dela na koji su postavljeni senzori za detekciju linije. Potrebno je 5 vijaka: dva vijka služe za spajanje tela robota i prednjeg dela, pomoću dva vijka ploča sa mikrokontrolerom je fiksirana za donju ploču, dok peti vijak služi kao treći oslonac robota, a njime se podešava i udaljenost senzora od površine po kojoj se robot kreće.
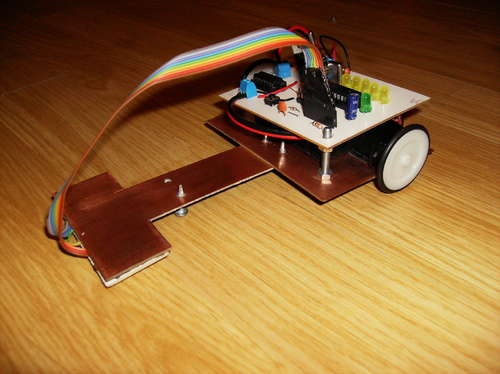
Slika 2. Izgled robota
Senzore ćemo napraviti pomoću 5 IR SMD dioda, 5 SMD fototranzistora i 5 1k SMD otpornika. Između IR diode i fototranzistora stavićemo malo crnog silikona kako IR svetlost ne bi direktno padala na fototranzistor. Napomena: sve šeme i PCB ćete moći da preuzmete sa linka koji se nalazi na kraju ovog teksta.
Srce ovog robota čini ATMEGA8 mikrokontroler koji dobija informacije sa senzora i pokreće L293D – integrisano kolo namenjeno upravljanju motorima. Spisak delova koji su vam potrebni, kako biste napravili upravljački blok:
- 1 × 28-pin podnožje (za ATMEGA8)
- 1 × 14-pin podnožje (za L293)
- 1 x ATMEGA8 – takođe možete koristiti ATMEGA 168 ili 328. Program je napravljen za Arduino, pa ako imate arduino, možete isprogramirati mikrokontroler pomoću njega, zatim ga izvaditi i postaviti u podnožje na robotu. Takođe, mikrokontroler možete programirati i pomoću ISp programatora.
- 1 x L293D
- 1 × 16MHz Crystal
- 2 × 22pF (10-28pF)
- 1 x LM7805
- 1 x Push Button
- 1 × 100nF
- 1 × 100uF
- 1 × 4.7 uF
- 6 x LED
- 1 × 1K otpornik
- 1 × 33R resistor
- Muška i ženska letvica (konektor)
- Držač za 4 AA baterije.
Sada je potrebno da uzmemo lemilicu u ruke i krenemo sa lemljenjem svih delova. Nakon što smo sve zalemili i sastavili našeg robota, potrebno je da učitamo kod u mikrokontroler. Nakon toga, ako je srce u redu, naš robot bi trebalo da “prohoda”.
Sve potrebne šeme i PCB-ovi su izrađeni u programu “Proteus”. Fajl sa šemama, PCB-ovima, uputstvima, HEX-fajlovima i dr. možete preuzeti ovde.














{kind=link}