












Predmet ovog projekta je upotreba PIR senzora pri detekciji pokreta. U ovom projektu korišćen je kontroler PIC18F25K20 koji treba da detektuje da li je senzor promenio stanje i koji će po potrebi aktivirati zvučnik ili piezo zvučnik. Kontroler takođe detektuje i napon baterije prilikom pokretanja. Algoritam je veoma jednostavan, a najbitniji deo je interrupt koji se javlja prilikom promene stanja senzora.
PIR (Passive Infrared) senzor omogućava detekciju pokreta i gotovo uvek se koristi da otkrije da li je čovek ušao ili izašao iz opsega senzora. Ovi senzori su mali, jeftini, male potrošnje i jednostavni za upotrebu. Zbog voih razloga oni su našli primenu u aplikacijama u kućnim ili poslovnim okruženjima. PIR senzori su u osnovi napravljeni od piroelektričnih senzora koji mogu da detektuju različite nivoe infracrvenog zračenja. Svi predmeti i bića oko nas emituju infracrvena zračenja određenih intenziteta. Topliji predmeti emituju zračenja jačeg intenizteta, a hladniji slabijeg. Senzor u detektoru pokreta je zapravo podeljen na dva polovine. Razlog za to je činjenica da mi želimo da detektujemo pokret (promenu), a ne prosečan nivo zračenja. Polovine su povezane pa tako mogu da potiru jedna drugu. Ako jedna polovina vidi više ili manje zračenja, stanje izlaza će se promeniti.
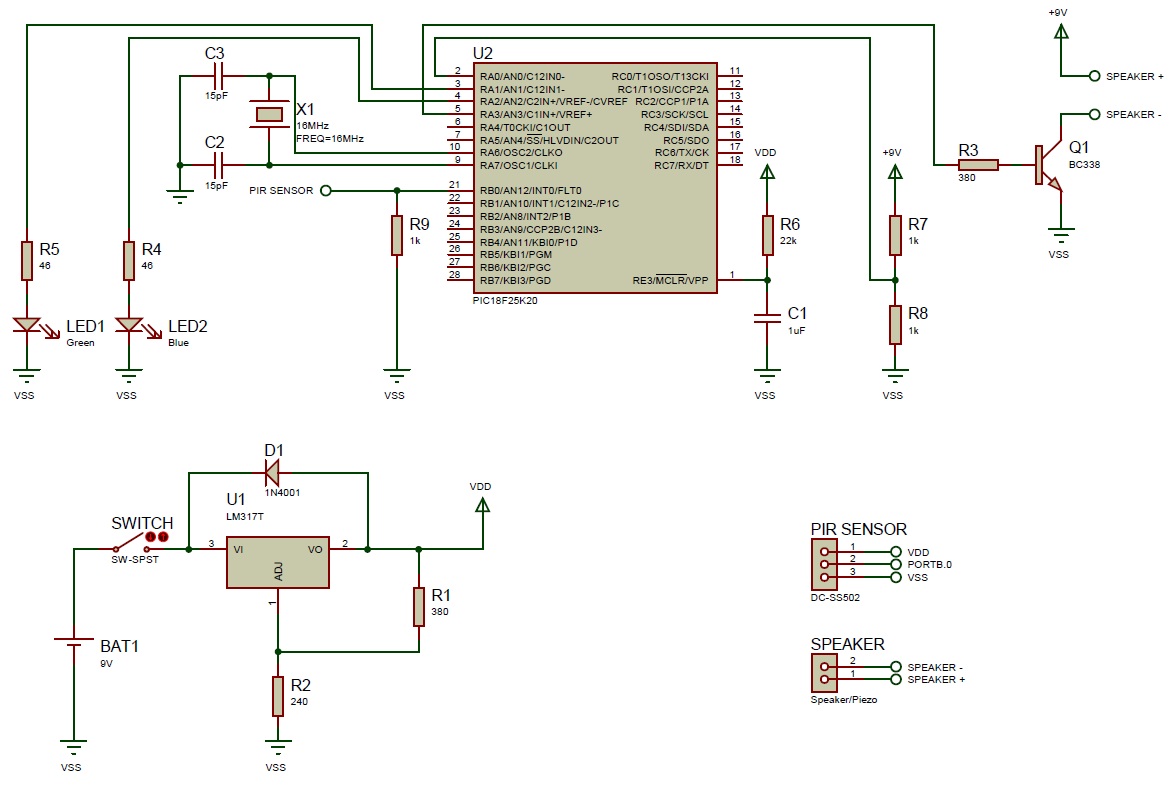
Slika 1. Električna šema uređaja
Kao što se sa šeme (Slika 1) može videti, uređaj je veoma jednostavan. Napajanje je preko baterije od 9V. Pomoću otpornika R7 i R8, proverava se stanje baterije. RC kolo na Vpp pinu (R6 i C1) treba da uvedu kašnjenje prilikom uključivanja uređaja, jer zbog PIR senzora dolazi do pada napona i tada senzor daje neke nepoznate vrednosti. U projektu je korišćen zvučnik od 8Ω, mada se može koristiti i piezo zvučnik.

Slika 2. Izgled uređaja
PIR senzor radi pri naponu od 3.3V pa se zato napaja energijom preko stabilizatora napona LM317T. Izlazni pin senzora je povezan na PORTB.0 i kada dođe do promene stanja, dolazi do javljanja interrupt-a. Koristi se i pull-down otpornik, kako bi bili sigurni da je PORTB.0 na niskom nivou. Senzoru je potrebno 10 do 12 sekundi između dve promene stanja, a opseg je 2 do 3 metra.
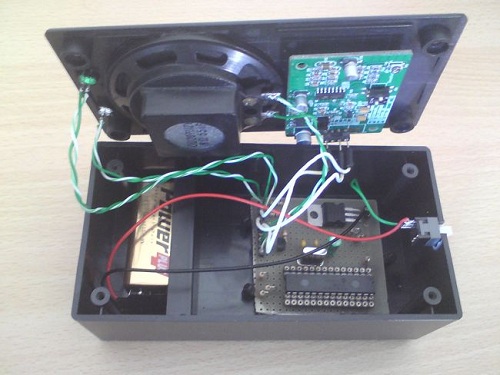
Slika 3. Izgled unutrašnjosti uređaja
Algoritam
Pri uključivanju, obe LED su uključene i tada se testira baterija. Ako je napon na odgovarajućem nivou, LED1 (zelena) će zatreperiti tri puta. Ako je napon ispod potrebnog nivoa, LED2 (plava) će zatreperiti tri puta. Zatim će se uključiti LED1. Ovakvo stanje se neće promeniti sve dok ne dođe do detekcije pokreta. Tada će se isključiti LED1, uključiće se LED2 i generisaće se zvuk u trajanju od 5 sekundi. Potom se sve vraća u prvobitno stanje.


















{kind=link}
Odlican clanak da se sazna kako radi PIR senzor.