











 Servo motori su rotacioni aktuatori koji se koriste u aplikacijama gde je potrebno upravljanje ugaonom pozicijom, brzinom i ubrzanjem. Sastoje se od odgovarajućeg motora u kombinaciji sa senzorom koji daje informaciju o poziciji. Servo motori takođe sadrže i relativno sofisticirani kontroler, često odvojen modul, namenjen za upotrebu sa servo motorima. RC (Radio Control) servo motori se najčešće koriste u aplikacijama sa daljinskim upravljanjem (mali roboti, daljinski upravljani automobili, avioni, brodovi itd).
Servo motori su rotacioni aktuatori koji se koriste u aplikacijama gde je potrebno upravljanje ugaonom pozicijom, brzinom i ubrzanjem. Sastoje se od odgovarajućeg motora u kombinaciji sa senzorom koji daje informaciju o poziciji. Servo motori takođe sadrže i relativno sofisticirani kontroler, često odvojen modul, namenjen za upotrebu sa servo motorima. RC (Radio Control) servo motori se najčešće koriste u aplikacijama sa daljinskim upravljanjem (mali roboti, daljinski upravljani automobili, avioni, brodovi itd).
Upravljanje RC servo motorima
RC Servo motor poseduje tri priključka, jedan upravljački i dva preko kojih se motoru dovodi napajanje. Upravljački signal se koristi za upravljane ugaonom pozicijom izlazne osovine i najčešće je to PWM (Puls-Width Modulation) signal. Trajanje impulsa PWM signala određuje poziciju osovine. Dok god je upravljački signal prisutan, servo motor zadržava poziciju svoje izlazne osovine. Pri pojavi signala, motor rotira osovinu u smeru u kom će se najpre ostvariti zadata pozicija. Kada se pozicija ostvari, osovina se zaustavlja i zadržava poziciju osovine. Upravljački signali servo motora uglavnom imaju period od 20 ms. Faktor ispune impulsa unutar periode će se odraziti na poziciju izlazne osovine. Na primer, ako želimo da osovinu dovedemo u ugao od -45° potrebno je da impuls upravljačkog signala traje 1 ms (faktorom ispune od 5%); kako bi se osovina pozicionirala u neutralni položaj (0°), širina impulsa treba da je 1,5 ms (faktor ispune 7,5%); ukoliko pak želimo da osovinu pozicioniramo na ugao od 45° potrebna širina impulsa je 2 ms (faktor ispune 10%).
Širina impulsa je najčešće 1 do 2 ms za kretanje osovine od 90°, mada mnogi servoi mogu i preko toga. Sredina opsega kretanja osovine je najčešće na 1,5 ms. Kraći impulsi okreću osovinu u smeru kazaljke na satu, a duži suprotno, što se može videti na slici 1.
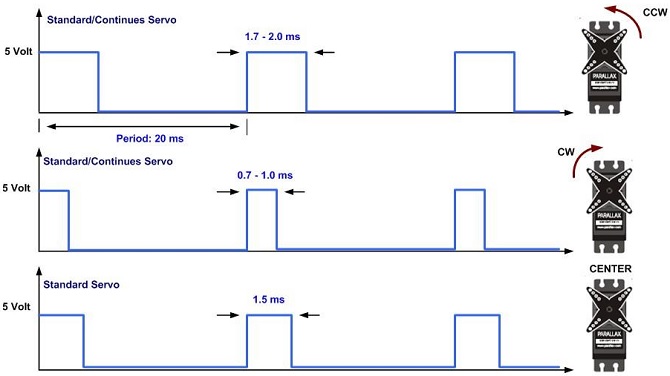 Slika 1. Smer rotacije RC servo motora u zavisnosti od širine impulsa upravljačkog signala
Slika 1. Smer rotacije RC servo motora u zavisnosti od širine impulsa upravljačkog signalaKonstrukcija RC servo motora
RC servo motori su sastavljeni iz tri dela: motora sa reduktorom, uređaja povratne sprege i upravljačke ploče. Kod RC servoa, uređaj povratne sprege čini najčešće potenciometar. Motor, preko niza zupčanika (koji čine reduktor), okreće izlaznu osovinu i potenciometar istovremeno. Upravljački modul “očitava” otpornost potenciometra i na taj način utvrđuje trenutnu poziciju izlazne osovine. Šematski prikaz strukture RC servo motora prikazan je na slici 2.
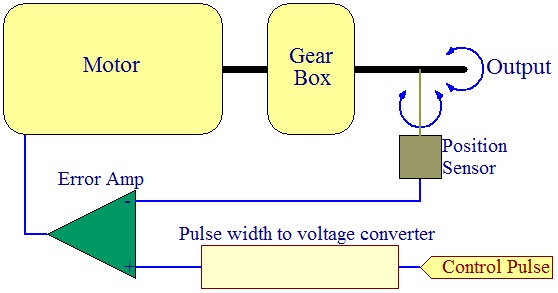
Slika 2. Šematski prikaz strukture RC servo motora
Primer upravljanja servo motorom možete pogledati ovde.
Izvor: Electronics-Base.com




 najidealniji za određenu aplikaciju?")






 primenjen u fabrici čelika")








{kind=link}