










 Krajem 2013.godine su završene probe, odnosno preliminarno DARPA – Defense Advanced Research Projects Agency takmičenje robota red je malo bolje upoznati ovogodisnjeg “preliminarnog” pobednika, koji je imao najbolji plasman, ne toliko poznatog, japanskog robota SCHAFT.
Krajem 2013.godine su završene probe, odnosno preliminarno DARPA – Defense Advanced Research Projects Agency takmičenje robota red je malo bolje upoznati ovogodisnjeg “preliminarnog” pobednika, koji je imao najbolji plasman, ne toliko poznatog, japanskog robota SCHAFT.
Pre toga, ukratko, za one koji nisu upoznati, DARPA je agencija u okviru Ministarstva odbrane Sjedinjenih Američkih Država zadužena za finansiranje , istraživanje i razvoj novih tehnologija, kojima bi se koristila američka vojska (neformalno ih zovu centar ludih naučnika američke vojske).
Jedan od najuticajnijih projekata ove agencije je zasigurno razvoj prethodnika modernog interneta koji danas koristimo, zvanog ARPANET. DARPA je dosad već organizovala velika robotska takmičenja, DARPA Grand Challenge, gde su se ekipe takmičile da razviju autonomno vozilo, sposobno da samo savlada velika prostranstva, van puta, u određenom vremenskom intervalu. Nastavak ovog takmičenja je zahtevalo slične sposobnosti, ali u urbanoj sredini.
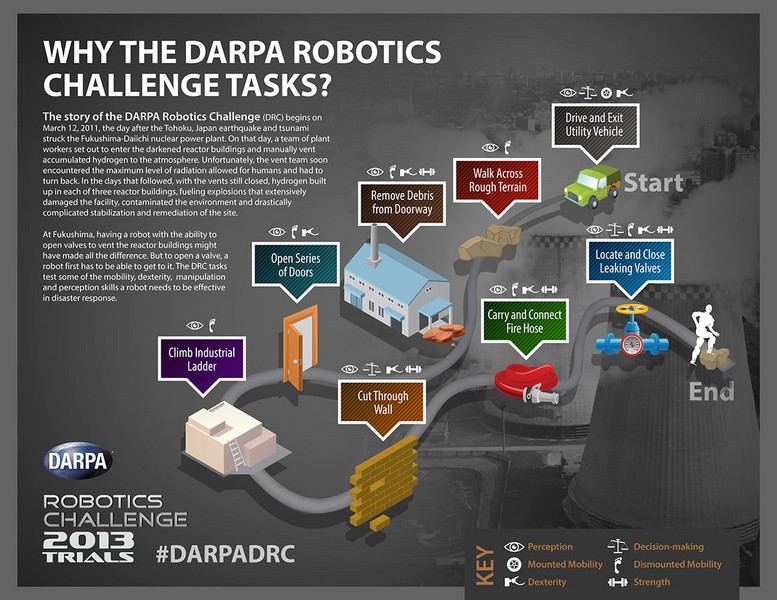
Najnovije robotsko takmičenje DARPA Robotics Challenge (DRC), u trajanju od 2012. do 2014. godine, fokusira se na razvoj humanoidnih robota čija je namena održavanje i obavljanje kompleksnih radnji u opasnim i zagađenim sredinama, koje su inače projektovane da u njima rade ljudi. Ovaj tip zadatka je pretežno “inspirisan” katastrofom u japanskoj nuklearnoj elektrani Fukushima Daiichi iz marta 2011. ali takođe i kao podstreh da se ubrza razvoj humanoidne robotike i da se dosadašnja teorija pretvori u nešto što se može i konkretno iskoristiti. Kao nusprodukt toga, dolazi i do razvoja globalnih simulacionih i softverskih platformi na kojima bi se zasnivao dalji razvoj.
Da bi dorastao ovom zadatku, robot mora biti sposoban da se snađe u sledećim situacijama, koje predstavljaju radno okruženje nakon (nuklearne) katastrofe:
- Da doveze pomoćno vozilo do radne zone.
{youtube}3CjxZlhHiXA|640|360{/youtube} - Samostalno pređe peške preko gomile betonskih blokova/kamenja.
{youtube}_lEjCmFVhYA|640|360{/youtube} - Otkloni otpad koji zakrčuje ulaz.
{youtube}iuysZlrINqU|640|360{/youtube} - Otvori vrata (sa kvakom) i uđe u zgradu.
{youtube}YQvEy3qTm8c|640|360{/youtube} - Popne se uz stepenice i hoda po stazi
{youtube}EMrSRcNIqIs|640|360{/youtube} - Koristi alat dizajniran za ljudsku upotrebu da probije betonski panel/zid.
{youtube}ShtL12YQE7g|640|360{/youtube} - Pronađe i zavrne ventil cevi koja curi.
{youtube}T5No8jgDp5E|640|360{/youtube} - Poveže vatrogasno crevo na hidrant i odvrne slavinu.
{youtube}ICBAbYC9Ib8|640|360{/youtube}
Detaljniji opis svake od pomenutih etapa mozete naći na engleskom jeziku na oficijalnoj stranici takmičenja i na video klipovima ispod svake od stavki.
U okviru DARPA takmičenja razvijeni hardver i softver timova učesnika proverava se tokom tri podjednako bitna događaja. Najpre se vrše simulacione probe, juna 2013. gde su timovi u virtualnom okruženju na jednostavnim zadacima isprobali svoje programe. Nakon toga, roboti su se isprobali i na praktičnom poligonu 20. decembra 2013. godine, u 8 etapa, postavljenim da predstave gorepomenute situacije. Kako se svaki od robota učesnika pokazao, ukoliko ste propustili, možete videti na Youtube kanalu DRC-a. Konačno finalno takmičenje, predviđeno za 20. decembar 2014. godine, zahtevaće od robota da izvrše nekoliko uzastopnih fizičkih zadataka u uslovima otežane komunikacije sa ljudskim operaterima koji upravljaju njima. U okviru ovog poslednjeg takmičenja, timovi će se boriti za glavnu nagradu od 2 miliona američkih dolara.Svi timovi koji učestvuju su podeljeni u 4 grupe. Grupe A i B finansira DARPA, dok su grupe C i D samofinansirajuće, s tim da timovi iz ove poslednje dve grupe, koje prođu simulacione i preliminarne praktične probe, mogu dobiti DARPA-ino finansiranje. Detaljniji opisi timova iz svake od grupa, sa linkovima do veb stranica istraživačkih grupa kojima timovi pripadaju, nalaze se na sajtu ovog takmičenja.
Robot SCHAFT
 Slika br.2 Schaft tim
Slika br.2 Schaft timSchaft robot (Slika br.3) je visok 1480mm, težak 95kg i širok 1309mm. robotskoj platformi. Unutar tima je razvijen sopstveni Inteligentni Robotski Kernel, koji upravlja potrebnim softverskim modulima zaduženim za prepoznavanje, planiranje, generisanje pokreta i korisničkog interfejsa. Sam tim se podeljen u tri grupe zaduženih za projektovanje hardvera, softvera i testiranje zadatih scenarija.

Jedna od novosti koje je ovaj tim uveo i patentirao, je nova vrsta aktuatora, koja omogućava mnogo jaču izlaznu silu i momenat, od onog koji je trenutno prisutan kod postojećih humanoida. Ova tehnologija je prvi put predstavljena u vidu Urata noge (naziv je dobila po Junichi Urata-i koji ju je razvio u okviru svog doktorata u saradnji sa AIST institutom.
Glavni koncept ove noge leži u tome da su standardni servo motori, zamenjeni motorima napajanim preko kondenzatora i sa vodenim hlađenjem, što im omogućava da daju jake izlaze, ne gubeći na kompaktnosti (Slika 3). Gorepomenute robotske noge su zasnovane na ovom principu (Slika br.4), sa drajverima motora koji daju visok napon i struju pomoću kondenzatora od 13.5 F, što dalje ima za posledicu da motori daju jake izlazne momente i velike brzine, a da su pritom pouzdani. Na ovaj, način njihov modifikovani Maxon motor od 200 W moze da dostigne brzinu od 1000°/s i momenat od 350 Nm, na kolenu prototipa robota prikazanog na slici 4. Da bi uspešno odgovorio na poremećaje iz okoline, npr. ako ga neko šutne, koristi se sistem za upravljanje ravnotežom, koji prepoznaje ove poremećaje i u 1 ms izračuna 170 mogućih kandidatskih pozicija na koje bi stopalo trebalo da se postavi da bi odolelo poremećaju i da robot ne bi pao.
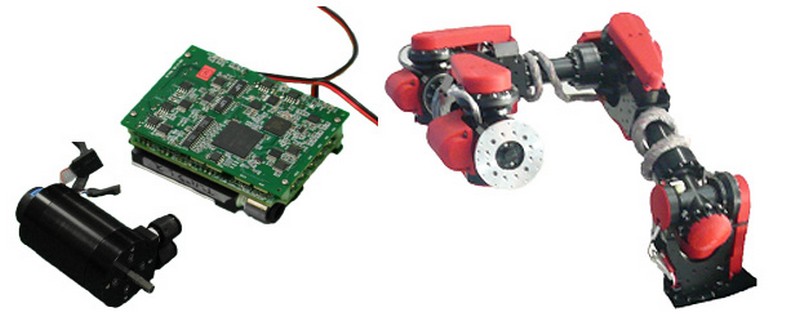
Slika br.4 Motor sa vodenim hlađenjem, njegov drajver i ruka koju pogoni
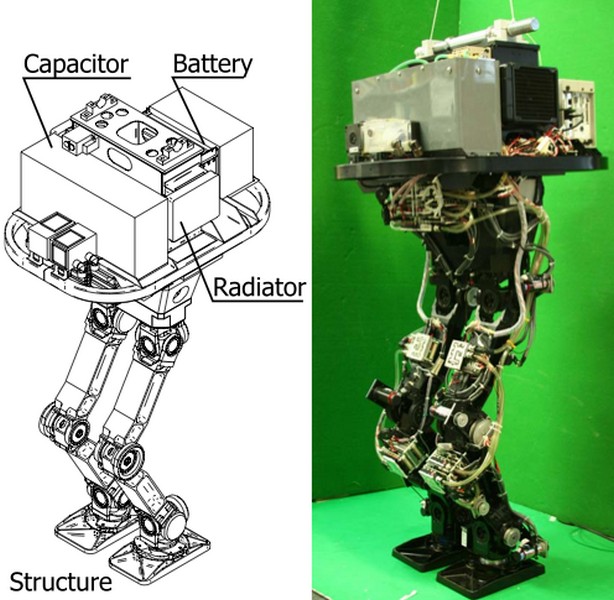 Slika br.5 Urata noge
Slika br.5 Urata nogeUčinak na probama
Robot Schaft se najbolje pokazao na DARPA-inim praktičnim probama, u poređenju sa ostalim robotima, što se moze videti na finalnoj tabeli (Tabela br.1) :
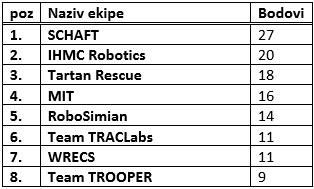
 Tabela br.2
Tabela br.2Što se pojedinih disciplini tiče, Schaft se najbolje pokazao prilikom prelaska preko gomile betonskih blokova, pri penjanju uz stepenice i otklanjanju otpada koji zakrčuje ulaz. Što se vožnje vozila tiče, robot WRECS je postigao najbolji rezultat, a THOR prilikom zavrtanja ventila na cevi. Tim sa floride IHMC je bio najbolji pri otvaranju vrata i probijanju kroz zid.
Iako roboti koji su bili prikazani na DARPA-inom takmičenju predstavljaju “crème de la crème” današnje humanoidne robotike i izgledaju kao da su izašli iz naučnofantastičnih filmova, oni su ipak još uvek poprilično slabi što se efikasnosti tiče. Naime, uprkos tome što na kraju (ponekad) uspeju da odrade zadatak, to se dešava nakon mnogo padova, grešaka, intervencija timova i takođe mnogo, mnogo vremena, što je neprihvatljivo u realnim situacijama. Da bi ovi humanoidi bili potpuno autonomni, potrebno je da budu sposobni da samostalno prepoznaju objekte iz svoje sredine i teren, ali takodje i da samostalno donose odluke. Na primer, da nadju bušilicu i da zaključe kako da joj pristupe i iz kog pravca i kojim zahvatom da je uzmu.
Pored svega, ovo takmičenje je dalo presek trenutnog stanja, ali i ubrzalo i koncentrisalo razvoj i nadamo se utabalo put za dalji napredak i praktičnu primenu servisnih robota. Kompleksni hod, naročito na neravnom terenu, se sa dobrim rezultatima primenjuje na robotskim sistemima, koji odolevaju spoljašnjim poremećajima i pomoću dvoručne manipulacije mogu da interaguju sa okolinom primarno dizajniranom za ljude.
Nastavkom u ovom tempu intenzivnog rada, sve ove funkcionalnosti bi se trebale dovesti unutar granica prihvatljivih. Ostaje da se vidi koliki će biti pomak do 20. decembra 2014. kada će se ovi roboti ponovo suočiti sa još realnijim situacijama i oštrijim uslovima, ali takođe i naučnim svetom i gledaocima sa još većim iščekivanjima i podignutom lestvicom kriterijuma.
Evo još nekoliko slika sa takmičenja:




 najidealniji za određenu aplikaciju?")














{kind=link}