











 RC servo motori se najčeće koriste kada trebamo savladati male sile, kao sto su otvaranje nekih vratanca, prenošenje tereta malih dimenzija na malom rastojanju. Najčešću primenu imaju kod izrade malih robota, robotskih ruka i drugih manipulatora. Osnovu RC servo motora čini DC motor koji je povezan na potenciometar.
RC servo motori se najčeće koriste kada trebamo savladati male sile, kao sto su otvaranje nekih vratanca, prenošenje tereta malih dimenzija na malom rastojanju. Najčešću primenu imaju kod izrade malih robota, robotskih ruka i drugih manipulatora. Osnovu RC servo motora čini DC motor koji je povezan na potenciometar.
U ovom projektu biće prikazano upravljanje manipulatorom (RC servo motorom) koji će kontrolu imati preko tastera. Ovo rešenje je pogodno jer je kontrola jednostavna, kako hardverski tako i softverski. RC servo motori ne zahtevaju snažno napajanje i pouzdani su u radu.
Za kontrolu RC servo motora je potrebno generisanje PWM signala određene ispune. Pritiskanjem tastera mikrokontroler prepoznaje koji je taster aktiviran i generiše određen PWM signal kako bi motor pravilno odreagovao.
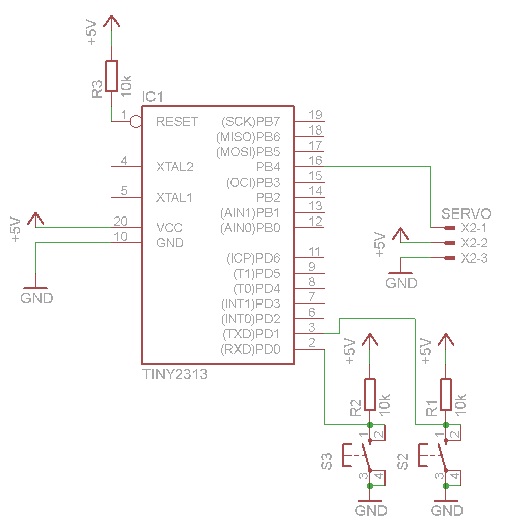
Slika br.1 Šema povezivanja.
PWM je veoma efikasan način pružanja srednje količine električne energije između potpuno uključenog i potpuno isključenog napajanja.
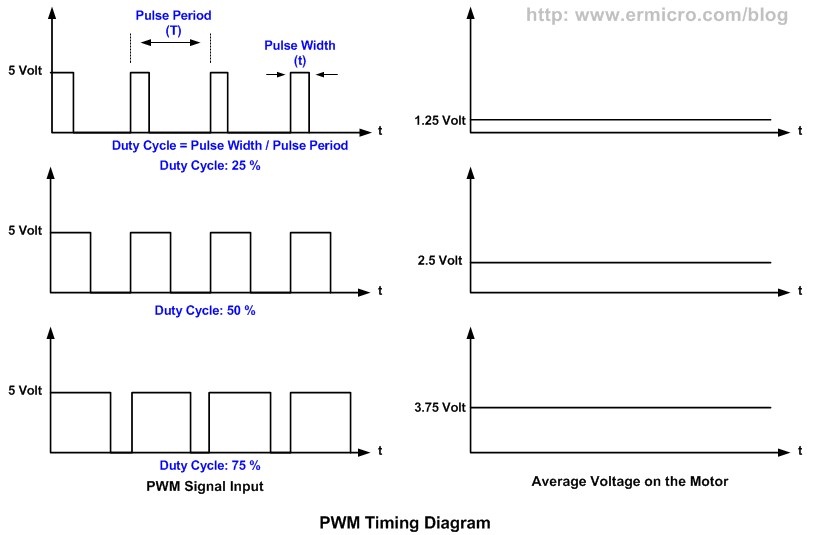
Slika br.2 PWM dijagram.
Termin duty cycle predstavlja odnos vremena za koje je stanje bilo na visokom naponskom nivou i vremena za koje je stanje bilo na niskom naponskom nivou. On se uglavnom izražava u procentima i 100% odgovara stalnom visokom naponskom nivou, dok 0% odgovara stalnom niskom naponskom nivou. Za kontrolu RC servo motora puls period treba da bude 20ms, a puls width se kreće u rasponu od 0.7 do 2ms što znači da je duty cycle u rasponu od 3.5 do 10%.
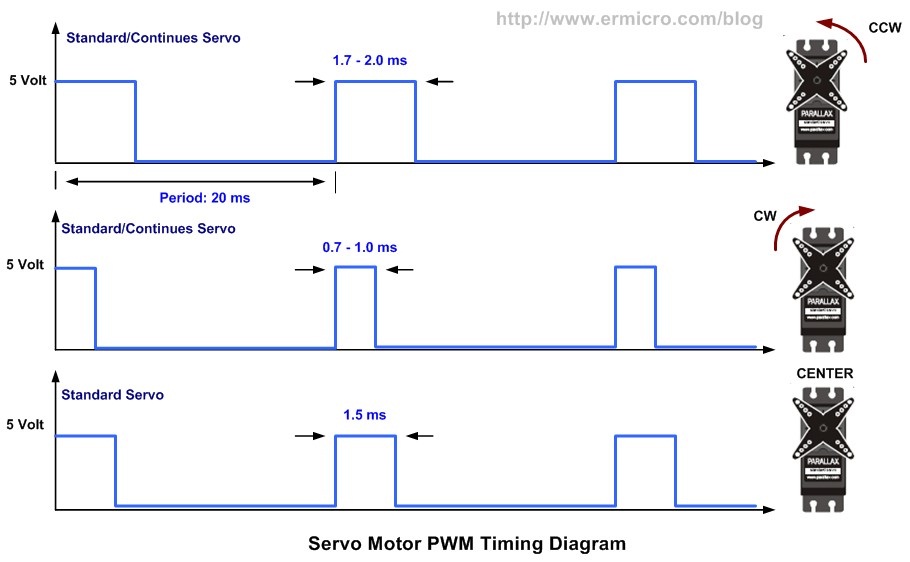
Slika br.3 RC servo PWM signal.
Kada je puls width 1.5ms servo se pozicionira u centralni položaj tj. okrene se za 90°. Za 1ms pozicionira se u 0° dok se za 2ms pozicionira u 180°. Aktiviranjem odgovarajućeg tastera mikrokontroler prepoznaje komandu željene manipulacije i generiše odgovarajuci PWM.
Možete pruzeti:















{kind=link}