











DP (Decentralized Peripherals) komunikacioni protokol je dominantno razvijen za aplikacije u kojima centralni programabilni uređaj (na primer PLC, PC ili neki drugi uređaj za kontrolu procesa) ima potrebu za brzom razmenom podataka sa distribuiranim periferijskim uređajima, kao što su I/O uređaji, električni pogoni, ventili, razni davači signala (senzori) i drugo. Osnovna i prva verzija DP protokola je DP-V0, o drugim verzija biće reči nešto kasnije.
DP-V0
DP-V0 realizuje osnovne funkcionalnosti DP protokola, pod kojima je uglavno podrazumeva ciklična razmena podataka kao i dijagnostika uređaja periferijskog modula, kao i celog komunikacionog kanala. Centralni kontroler (master) je u stanju da periodično (ciklično) čita ulazne informacije od slave-ova i šalje izlazne informacije istima. Da bi se to postigle u realnom vremenu nije dovoljno da komunikacioni kanal ima veliku propusnu moć. Bitna je i struktura samog protokola koji treba da obezbedi jednostavan mehanizam za rukovanje porukama, mogućnost brze dijagnostike stanja i otpornost na smetnje usled preslušavanja signala.
Dijagnostičke funkcije koje implementira DP-V0 omogućavaju proveru opšte spremnosti uređaja na mreži za normalan rad (tj. detekciju stanja pregrejanosti, podnapona, prenapona i sl.), proveru I/O podsistema uređaja, kao i ispravnost funkcionisanja samog komunikacionog kanala (npr. detekciju kratkog spoja između provodnika prenosnog medijuma).
DP protokol definiše tri tipa uređaja: DPM1 (DP master Class 1), DPM2 (DP master Class 2) i Slave uređaje. DPM1 predstavlja formalan opis centralnog kontrolera koji periodično razmenjuje podatke sa distribuiranim slave uređajima. Tipični predstavnici ove grupe su PLC ili PC. DPM1 ostaruje aktivan periodičan pristup magistrali i u okviru njega vrši čitanje i upis podataka prema slave-ovima. DPM2 takođe ostvaruje aktivan pristup na komunikacionu liniju ali to koristi samo u periodima konfigurisanja novog komunikacionog čvora. Van tih perioda DPM2 najćešće nije ni aktivan na liniji. DPM2 su specijalni uređaji koji pomažu konfigurisanje novog čvora i učestvuju u procesu dijagnosticiranja uzroka otkaza i oporavka uređaja nakon njega. Slave je periferijski uređaj koji se prema komunikacionoj liniji ponaša pasivno, tj. nikad sam ne generiše već samo reaguje na direktne upite. Takvo ponašanje slave-a je krajnje jednostavno za implementaciju.
DP-V0 mreža se može realizovati sa jednim (mono-master) i više (multi-master) master-a. U slučaju mono-master konfiguracije samo jedan master je aktivan na mreži u toku rada. Primer takve sistema je prikazan na slici br.1. Na njoj je PLC centralna upravljačka komponenta, dok su slave-ovi povezani na njega preko prikazanog prenosnog medijuma. Ovakva konfiguracija obezbeđuje najkraće trajanje jednog komunikacionog ciklusa, tj. omogućava najefikasniji prenos.
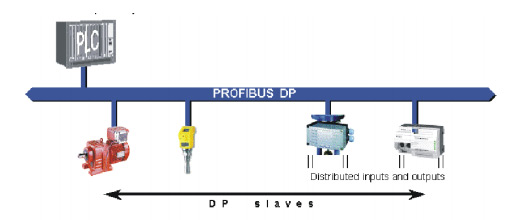
Slika br.1 PROFIBUS DP mono-master sistem
Multi-master konfiguracija podrazumeva da je više master-a povezano na komunikacionu liniju. Međutim, na nivou DP-V0 i dalje postoje određena ograničenja u toliko što je svaki slave na mreži pridružen samo jednom master-u. To znači da samo taj master može da upisuje sadržaj u ulazne registre tog slave-a, dok svi master-i na liniji mogu da prihvataju njegove izlazne podatke i čitaju njegove statusne registre. Projektant mreže je odgovoran za pridruživanje slave-ova odgovarajućem master-u.
Da bi se obezbedio visok nivo zamenljivosti uređaja istog tipa, a različitih proizvođača, izvršena je standardizacija ponašanja sistema. Kako je ponašanje sistema dominantno određeno akcijom DPM1 uređaja, to su njegova stanja grupisane u tri kategorije: pasivno stanje (stop), režim brisanja (clear) i operativno stanje (operate). U pasivnom stanju nema komunikacije između DPM1 i slave-a. U režimu brisanja DPM1 može da čita statusne registre slave-a, ali van tog intervala izlaz slave-a su u neaktivnom stanju. Operativno stanje posrazumeva periodični radni režim u kom DPM1 prima informacije od slave i piše u njegove interne registre. Da bi master izvestio slaveove o planiranoj aktivnosti, on šalje multicast komandu svim pridruženim slave-ovima sa sadržajem koji opisuje planirane aktivnosti.
Način reagovanja sistema na grešku u procesu razmene informacija je definisan u vreme konfigurisanja DPM1 uređaja. Prema tome razlikujemo dve mogućnosti: ako se detektuje greška u procesu komunikacije, DPM1 može da prevede problematični slave uređaj u pasivno stanje u kom on nije više u stanju da vrši razmenu informacija po komunikacionoj liniji, ili da nastavi sa normalnim radom u kom slučaju korisnik preuzima odgovornost za dalje reagovanje celog sistema.
DP-V0 definiše tri tipa komunikacije između DPM1 uređaja i slave-a: parametrizaciju, konfiguraciju i razmenu podataka. U procesu parametrizacije i konfigurisanja DPM1 ili DPM2 uređaji prosleđuju slave-u informacije o njegovoj adresi (rednom broju), njegovom tipu, formatu i dužini informacija koje se razmenjuju i slično. Sistem može biti konfigurisan tako da master može u toku normalnog rada porukama za razmenu informacija po potrebi rekonfigurisati bilo koji slave na mreži.
Pored razmene podatak DMP1 može svim, ili grupi slave-ova slati i izvestan broj kontrolnih komandi čiji je zadatak da omoguće sinhronizaciju rada master-a na neki događaj na slave uređaju. U toj grupi komandi razlikujemo sync i freeze komande. Obe komande uzrokuju da slave obustavi slanje podatka master-u do prijema naredne iste komande. Razlika među njima je u tome što u slučaju sync komande slave neprekidno update-uje svoj sadržaj pri promeni vrednosti svojih eksternih ulaza, dok u slučaju freeze komande sadržaj se čuva, a informacije sa eksternih ulaza se u tom periodu nepovratno gube.
U toku konfigurisanja sistema, dizajner mreže definiše i jedan bitan bezbedonosni parametar. To je period monitoringa komunikacione linije. Naime i master i slave prate komunikaciju na mreži i reaguju u slučaju da se ne ostvari ni jedna transmisija u predviđenom vremenskom intervalu. DPM1 to realizuje preko više tajmera pri čemu je za svaki slave rezervisan po jedan tajmer. Slave monitoring komunikacije ostvaruje korišćenjem dobro poznate watchdog funkcionalnosti. Pored toga, u multimaster konfiguraciji, slave je zadužen i za kontrolu pristupa, tj. dužan je da spreči direktan pristup (pristup koji podrazumeva na samo čitanje stanja već i upis podataka) onom DPM1 uređaju kojem konkretni slave nije pridružen u procesu konfigurisanja sistema.
Dalja upustva i pojasnjenja pojmova mozete prinaci u sledecoj literaturi: Implementacija CAN protokola na pogonskom kontroleru baziranom na TMS320LF2407 digitalnom signal procesoru, autori: Željko Pantinć i Igor Stamenković.


















{kind=link}