Aibo je mali robot sa četiri noge i velikim brojem zglobova kojeg pokreće OS razvijen od strane kompanije Sony. Model Aibo ERS-7 karakterišu sledeće osobine: 64MB RAM memorije, 802.11b wireless ethernet, video kamera, 3 IR senzora, 18 zglobova kontrolisani PID-om, 26 LE dioda i veliki broj drugih senzora. Tekkotsu je softver pisan u C++ programu i prvobitno je napisan za pokretanje Sony Aibo ali je kasnije našao primenu za pokretanje i upravljanje drugim robotima.
Roboti se oponašaju ili se jednim upravlja preko drugog uz pomoć wireless rutera. Jedan robot je HOST a drugi CLIENT. Ova ”telepatija”, koja je prikazana na video snimku na kraju teksta, radi na sledeći način. EventRouter i RemoteRouter se nalaze kod Client robota, dok je na Host robotu EventProxy i EventRouter. Kada se RemoteRouter poveže sa Host robotom čeka event(događaj). Kada EventRouter pošalje događaj, EventProxy ga prosleđuje RemoteRouteru gde se dekodira i šalje EventRouteru na Client robotu koji prima komandu i dalje upravlja robotom.











 Aibo je mali robot sa četiri noge i velikim brojem zglobova kojeg pokreće OS razvijen od strane kompanije Sony. Model Aibo ERS-7 karakterišu sledeće osobine: 64MB RAM memorije, 802.11b wireless ethernet, video kamera, 3 IR senzora, 18 zglobova kontrolisani PID-om, 26 LE dioda i veliki broj drugih senzora. Tekkotsu je softver pisan u C++ programu i prvobitno je napisan za pokretanje Sony Aibo ali je kasnije našao primenu za pokretanje i upravljanje drugim robotima.
Aibo je mali robot sa četiri noge i velikim brojem zglobova kojeg pokreće OS razvijen od strane kompanije Sony. Model Aibo ERS-7 karakterišu sledeće osobine: 64MB RAM memorije, 802.11b wireless ethernet, video kamera, 3 IR senzora, 18 zglobova kontrolisani PID-om, 26 LE dioda i veliki broj drugih senzora. Tekkotsu je softver pisan u C++ programu i prvobitno je napisan za pokretanje Sony Aibo ali je kasnije našao primenu za pokretanje i upravljanje drugim robotima.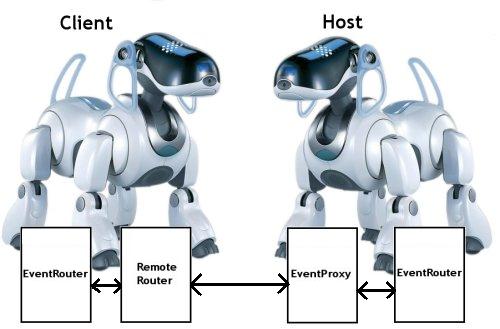 Roboti se oponašaju ili se jednim upravlja preko drugog uz pomoć wireless rutera. Jedan robot je HOST a drugi CLIENT. Ova ”telepatija”, koja je prikazana na video snimku na kraju teksta, radi na sledeći način. EventRouter i RemoteRouter se nalaze kod Client robota, dok je na Host robotu EventProxy i EventRouter. Kada se RemoteRouter poveže sa Host robotom čeka event(događaj). Kada EventRouter pošalje događaj, EventProxy ga prosleđuje RemoteRouteru gde se dekodira i šalje EventRouteru na Client robotu koji prima komandu i dalje upravlja robotom.
Roboti se oponašaju ili se jednim upravlja preko drugog uz pomoć wireless rutera. Jedan robot je HOST a drugi CLIENT. Ova ”telepatija”, koja je prikazana na video snimku na kraju teksta, radi na sledeći način. EventRouter i RemoteRouter se nalaze kod Client robota, dok je na Host robotu EventProxy i EventRouter. Kada se RemoteRouter poveže sa Host robotom čeka event(događaj). Kada EventRouter pošalje događaj, EventProxy ga prosleđuje RemoteRouteru gde se dekodira i šalje EventRouteru na Client robotu koji prima komandu i dalje upravlja robotom.
















{kind=link}