











Prenos svake pojedinačne poruke na komunikacionoj mreži realizovanoj uz pomoć bazičnog CAN protokola je uvek uzrokovan nekim događajem na predajnom ili prijemnom čvoru (event triggered – ET). U praktičnim primenama je realno očekivati i situaciju kada više čvorova zahteva prenos svojih poruka u istom vremenskom trenutku, što prouzrokuje znatno opterećenje mreže. Nedestruktivni arbitracioni mehanizam ovog protokola obezbeđuje da se poruke prenose sekvencijalno u skladu sa prioritetom identifikatora pripadajućeg čvora. Ovakve situacije mogu biti kritične za sisteme koji rade u realnom vremenu, jer tipično za svaku od poruka postoji maksimalni vremenski interval unutar kog ona mora biti prosleđena do odgovarajućeg prijemnika. Neispunjavanje tog uslova može da naruši ispravan rad sistema.
U savremenim vozilima, broj mikrokontrolera, senzora i aktuatora rapidno raste, neprekidno povećavajući protok informacija po mreži. Sve je veći i broj bezbedonosnih sistema u vozilu, čije informacije ni u kom slučaju ne smeju osetiti posledice preopterećenja mreže. Takođe, jedan od najkritičnijih segmenata u budućnosti će biti tzv. xbw (x – by – wire) sistemi. To su sistemi koji će u budućnosti samostalno kontrolisati vozilo i njegovu dinamiku, jer se očekuje hidraulično i pneumatsko rasprezanje komande vozača i točkova (danas dostupna prva generacija xbw sistema još uvek poseduje pneumatski i/ili hidraulični backup). Svi pomenuti sistemi zahtevaju veći determinizam u ponašanju CAN komunikacione mreže. TTCAN protokol predstavlja jedno od najboljih do sada prezentovanih i standardizovanih rešenja koje je usmereno ka ispunjenu pomenutih zahteva.
TTCAN (time – triggered communication on CAN) je viši CAN protokol koji obezbeđuje sinhronizaciju svih čvorova na mreži, kao i planiranje i realizaciju vremenski determinisanog rasporeda prenosa poruka (time triggered – TT). Pored toga, TTCAN podržava i slanje ET poruka. Tako u vozilima tipično imamo TT poruke od sistema za kočenje i ET poruke od sistema za regulaciju temperature. Uvođenje TT poruka je omogućilo implementaciju zatvorenih upravljačkih petlji na sisteme sa CAN baziranim mrežama. Pored automobilske industrije, TTCAN nalazi primenu i u domenu industrijske automatizacije i medicinske opreme, naravno, u daleko manjem obimu.
Osnove TT funkcionalnosti
TT funkcionalnost komunikacionog sistema podrazumeva da se sve aktivnosti nekog čvora koje predstavljaju njegov interface prema mreži (slanje i prijem poruka, i sl.) odvijaju po predefinisanom vremenskom rasporedu i sinhronizovano sa zajedničkim (globalnim) vremenom. To se najbolje da ilustrovati slikom br.‚1. Sa slike se vidi da se poruka a šalje kada apstraktni časovnik dostigne 3 i 6, dok se, recimo, poruka c šalje kada se postigne vremenski trenutak označen sa 5.
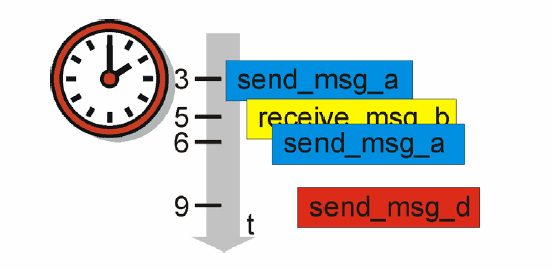
Slika br.1 TT funkcionalnost komunikacionog sistema
Pojam referentne poruke (reference message) i osnovnog ciklusa (basic cycle)
TTCAN je baziran na vremenskoj aktivaciji i periodičnoj komunikaciji koja je taktozvana preko tzv. referentne poruke koju šalje vremenski master. Vremenski master je čvor na mreži koji ne mora biti ni po čemu drugačiji od drugih, već kao dodatak ima implementiranu rutinu za kreiranje i slanje pomenute poruke. Referentna poruka se prepoznaje po specijalno rezervisanom identifikatoru. Sadržaj polja podataka te poruke je različit u zavisnosti od toga da li se radi o osnovnoj verziji TTCAN protokola (TTCAN –level 1) ili o novijoj proširenoj veziji (TTCAN – level 2). U osnovnoj verziji samo prvi bajt polja podataka sadrži izvesne kontrolne bitove, dok se preostalih 7 bajtova mogu koristiti za prenos aplikacijski orijentisanih podataka vremenskog master-a kao čvora. U proširenoj verziji TTCAN protokola kontrolni bitovi u polju za podatke zauzimaju donja 4 bajta, jer sada sadrže i informaciju o trenutnoj vrednosti globalnog vremena vremenskog master-a. Opet su gornja 4 bajta polja za podatke raspoloživa za prenos korisnih podataka.
Vremenski period između dve uzastopne referentne poruke se naziva osnovni cilkus (jedan osnovni cilkus je prikazan na slici br.2). On se sastoji od nekoliko vremenskih prozora različitog trajanja i predstavlja omogućeni vremenski interval za jedan ciklus komunikacija na mreži. Sve poruke koje se prenose imaju strukturu poruke podataka standardnog CAN protokola. Po svojoj nameni vremenski prozori se dele u tri grupe: isključive, arbitracione i slobodne vremenske prozore. Početni trenutak isključivog vremenskog prozora predstavlja trenutak za start poruke konkretno određenog čvora. Arbitracioni vremenski prozor je vremenski interval u kom svi čvorovi mogu slati svoje ET poruke, uz ponovno uspostavljanje arbitracionog mehanizma na komunikacionoj liniji. U tom intervalu se može poslati proizvoljan broj poruka, ali tako da se vremenski interval arbitracionog prozora ne prekorači. Slobodni vremenski prozori su namenjeni za buduća proširenja mreže. Naime, kada se instalira novi čvor na mrežu, ovaj prozor se može preimenovati u bilo isključivi, namenjen tom čvoru, bilo u arbitracioni, čime se proširuje propusni opseg komunikacione linije.
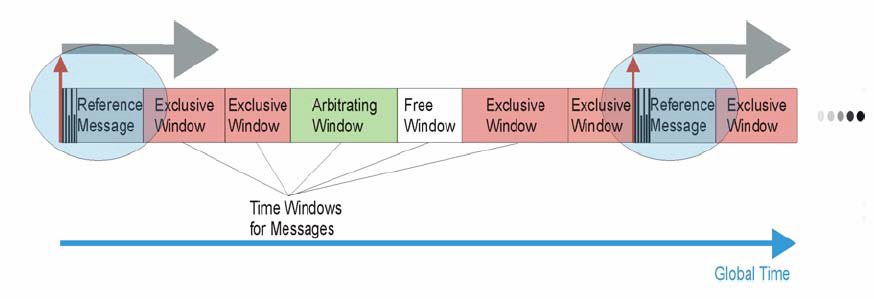
Slika br.2: Isključivi i arbitracioni vremenski prozori
Potrebno je posebno istaći jednu činjenicu koja se često pogrešno interpretira: u vremenskom intervalu trajanja isključivog prozora ni na koji način nije suspendovano dejstvo nedestruktivne arbitraže na komunikacionoj liniji. Naime, najčešće se jedan isključivi vremenski prozor od strane dizajnera mreže dodeljuje jednom čvoru. Međutim, moguće je da se isti isključivi vremenski interval dodeli za dva ili više čvorova. U takvom slučaju, arbitracioni mehanizam određuje koja poruka je višeg prioriteta, i samo će ona da se prenese. Kako će se ista situacija ponavljati u svakom od osnovnih ciklusa, ovakvo dizajnersko rešenje nema previše smisla i retko se sreće u praksi.
Interesantno je napomenuti da automatska retransmisija poruke nije omogućena ni u insključivom ni u arbitracionom vremenskom prozoru. Delimično ublaženje ove dve restriktivne osobine TTCAN protokola predstavlja činjenica da je u okviru jednog osnovnog ciklusa moguće različite isključive intervale dodeliti istom čvoru.
Mada se na prvi pogled čini da mrežni kontroler u svakom čvoru mora pamtiti mnoštvo informacija o rasporedu komunikacije na mreži, to nije slučaj. Naime, kontroler mora samo da zna kada on sam šalje i prihvata TT poruke, kao i kada započinje, i koliko traje arbitracioni vremenski prozor za slanje simultanih poruka. Čak šta više, poredeći sa konkurentskim TT sistemima, znanje koje TTCAN čvor mora posedovati o rasporedu komunikacije na mreži je minimalno. Tabela sa rasporedom informacija mora biti konfigurisana u svakom čvoru pre startovanja celog sistema.
Sistemske matrice
Praksa je pokazala da konkretne primene zahtevaju mnoštvo različitih upravljačkih petlji zadatog različitog perioda trajanja. Svi oni zahtevaju informacije po različitoj vremenskoj šemi, što se svakako ne može postići uz pomoć jednog TTCAN osnovnog cilkusa. Zbog toga se osnovni ciklusi povezuju tako da formiraju tzv. sistemsku matricu. Ovakve vemenske šeme sada pružaju daleko veću fleksibilnost u definisanju aktivnosti pojedinačnih čvorova. Na primer, neki čvor može slati svoju poruku unutar svakog osnovnog cilkusa, unutar svakog drugog ili recimo, samo jednom u toku cele sistemske matrice. Primer sistemske matrice od 4 osnovna cilkusa je dat na slici br.3.
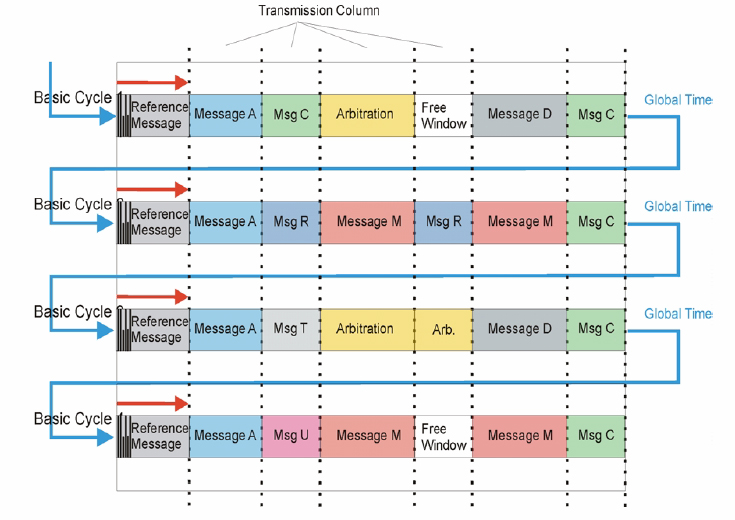
Slika br.3: Primer TTCAN matrice sistema
Izvršavanje osnovnog ciklusa na mreži je u svakom čvoru kontrolisano preko tkz. ciklusnog vremena (cycle time). Ciklusno vreme garantuje TT rad ovog protokola. Brojač koji meri ovo vreme se restartuje nakon svakog završetka osnovnog ciklusa. Rezolucija sa kojom se može iskazati ciklusno vreme je tzv. mrežna vremenska jedinica (network time unit – NTU). U osnovnoj verziji TTCAN protokola, NTU je jednak nominalnom vremenskom intervalu trajanja jednog bita i fiksnog je trajanja. U proširenoj verziji TTCAN potokola, NTU se dobija deljenjem vremenskog intervala trajanja sistemskog takta definisanog učestanošću oscilatornog kola konkertnog čvora sa odgovarajućim koeficijentom (time unit ratio – TUR). U tom slučaju se NTU izražava u sekundama. Koeficijent TUR nije fiksan već se neprekidno koriguje u toku rada, a sve u cilju postizanja što bolje usklađenosti između globalnog i ciklusnog vremena. Mehanizam za korekciju vrednosti TUR je relativno složen i njegovo izlaganje bi prevazišlo okvire ovog kratkog pregleda TTCAN protokola. Dovoljno je samo reći da se u tom procesu koristi informacija o vrednosti globalnog vremena koja je u proširenom TTCAN protokolu dostupna kroz polje podataka referentne poruke. Opisani postupak izračunavanja mrežne vremenske jedinice i ciklusnog vremena za slučaj proširenog TTCAN protokola je prikazan na slici br.4.
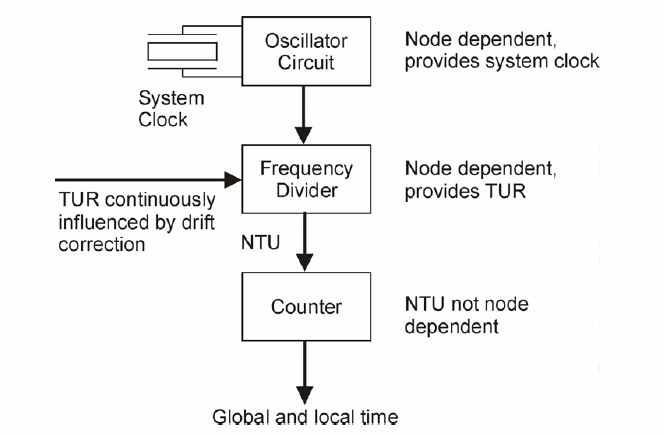
Slika br.4 Generisanje NTU

















 sklopke: Kompletan vodič za električnu zaštitu u vašem domu")

{kind=link}